| |
UFS Explorer Professional Recovery专业数据恢复软件是一个综合性的解决方案软件,用于解决复杂的数据恢复案例,包括 ...




要让《异人之下》电脑版运行更流畅、稳定,可以使用MuMu模拟器,不仅能在电脑上流畅运行,还支持键位设置、多开运行、 ...

吧友们好,智能手机市场上,华为和苹果一直是颇受欢迎的品牌。两家公司同年都推出了各自的旗舰手机,即华为P50 Pro和i ...




提供免费下载网站Mavom.cn ——— **苹果公司** 在中国推出其智能功能「**Apple Intelligence**」时,正面临着重 ...

用 Midjourney 生成摄影图相对来说,用的人并不是很多。大多数是用来生成艺术类,超现实主义,科幻类等等。其实只要想 ...

PART-01市场背景 对关注泰坦军团的粉丝而言,“mini-LED”一词可谓耳熟能详。作为近年开始崭露头角的新技术,行业在mi ...







11月8日,超欢乐自由宠物大世界手游《酷比大陆》正式开启测试招募 酷比大陆不仅有形态各异的奇兽,等你结交、培养,互 ...


安装维修玻璃门门锁,电子锁,密码锁及设备供应商,专业门禁厂家提供。门禁产品有:485联网型单门门禁控制器、双门门 ...

AirPods Pro国行1038可小刀 因声音问题于8月23日,天环广场进行官换 双耳换新,耳机仓没有换,故耳机为全新,耳机仓9 ...

第一次写这么长的cs相关文章,可能在文笔和逻辑上会有一些问题,希望大家多包涵,同时在B站也有同步发,在B站专栏搜cv ...



労倫行~新教員労務倫理行動総合審査~ https://www.dlsite.com/maniax-touch/work/=/product_id/RJ01279330.html ...

FL Studio这款编曲软件在编曲界可谓是大名鼎鼎,无论是刚刚入门的新手还是有一定经验的老玩家,都对FL Studio这款软件 ...

RELR-1DS-RELR-2DS漏电继电器 品牌:JOSEF约瑟商务热线021-5515-8386 产品型号:RELR-1DS、RELR-2DS可调漏电继电 ...

Crossover24.0.5中文破解版在 Mac 或 Linux 上运行,所以无需在 Windows 和 Mac / Linux 之间来回移动文件。您可以在 ...

新买的Mac mini 4,连接到studio display后,显示器设置中,分辨率最高只有2880*1620,请问是怎么回事?为什么不能5K ...





🌌苹果12 Pro Max的用户们,是否期待同时使用两个微信账号?现在,微信分身功能已经完美适配苹果12 Pro Max,让双账号 ...

8月24日消息 随着我国5G网络的快速普及,越来越多的消费者选择购买5G手机。国内外的手机厂商相继推出性能各异的5G手机 ...


中考考上重点,老妈奖了一些钱,想买个iPhone 15pro,但新机买不起,二手怕被坑,求大佬8u给点建议,求求了🙏🏻不靠谱 ...

看标题就能知道,台电又要准备发新平板啦啦啦啦啦! 不过,本文先着重来说说新品的储存规格——8+128GB,这也是近期 ...



电影100分钟(一小时40分钟)在线网站https://t.hnjpmp.com/vodplay/45290-1-1/https://www.jszkyyj.com/vp/145231-2- ...


Connected by intelligence Empowered by technology Become a Vcity blockchain node Open a new era of smart econo ...
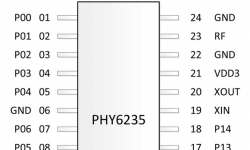
PHY6235是一款用于蓝牙低功耗和专有2.4G应用的系统级芯片(SoC)。它采用高性能、低功耗的32位RISC-V MCU,配备8KB保 ...




游侠原创:周一 欧盟正式颁布了新法律,规定在欧盟销售的电子设备必须将USB-TypeC作为其充电接口。适用于“中小型 ...




Office Tool Plus是一款相当牛逼的office安装工具,并且安装完了顺带激活,也可以很快捷的卸载office清除激活信息等等 ...


之前小联宝骏510航盛主机升级CarPlay的教程和升级包,需要的车友点击链接查看。 由于当时分享的教程和升级包仅适用于 ...


我是新疆保时捷tayccan车主,车友会俱乐部主要是方便咱们保时捷车主对车子有疑问或者 故障时可以在车友群求助交流。聊 ...

2024年8月21日,信达生物宣布,其KRAS G12C抑制剂氟泽雷塞片(商品名:达伯特®,代号:IBI351/GFH925)获国家药品监 ...

这是一台2014年的本,本来都沉睡好多年了,三代的i5CPU,带一个黑苹果免驱的GT720M独显(2G),DDR3L 1600 4G内存,为 ...

(无排单)周上限3.5r第五人格机刷 安官/渠道服/ios ★价目表: 周上限:散单1w/1.3r 包周(4.2w)3.5r 包月(四周4.2 ...


我目前使用 Z8x,之前一直是米粉,使 Redmi Note 11T Pro 与 Note 12 Turbo ,这几款红米的摄像头像素都比 Apple iPho ...


 微信扫一扫
微信扫一扫